接口技术
系统的构建,经常涉及将以不同编程语言编写的应用,与咱们的系统连接起来。我们可能将 C 用于提高效率,或编写底层的硬件驱动,抑或我们可能打算集成某个以 Java、Ruby 或其他编程语言编写的库。我们可以数种方式,将一些外语程序与 Erlang 连接起来。
-
通过在某个外部操作系统进程中,在 Erlang 虚拟机 外部 运行程序。这是一种 安全的 方法。当外部语言的代码不正确时,也不会导致 Erlang 系统崩溃。Erlang 通过称为一种称作 端口 的设备,控制外部进程,并经由面向字节的通信信道,与外部进程通信。Erlang 负责启动及停止外部程序,并可监控他们,当其崩溃时重启他们。这些外部进程,被称为 端口进程,因为其是通过某个 Erlang 端口控制的;
-
在 Erlang 中运行某个操作系统命令,并捕获结果;
-
在 Erlang 虚拟机 内部 运行其他语言的代码。这涉及将外部代码,与 Erlang 虚拟机的代码链接起来。这是一种 不安全的 方法。其他语言代码中的错误,可能会导致 Erlang 系统崩溃。虽然这种方法不安全,但却很有用,因为相比使用外部进程,他更有效率。
将其他语言代码链接进到 Erlang 内核,只能用于 C 等生成原生对象代码的那些语言,而不能用于 Java 等有其自己虚拟机的那些语言。
在本章中,我们将学习使用端口和操作系统命令,连接 Erlang。此外,还有一些使用链接驱动、原生实现函数(NIFs)及 C 节点等高级接口技术。这些高级技术未在本书中涉及,但在本章末尾,我们将简要介绍这些技术,并提供一些参考资料。
知识点:
linked-in drivers
natively implemented functions, NIFs
C-nodes
Erlang 如何与外部程序通信
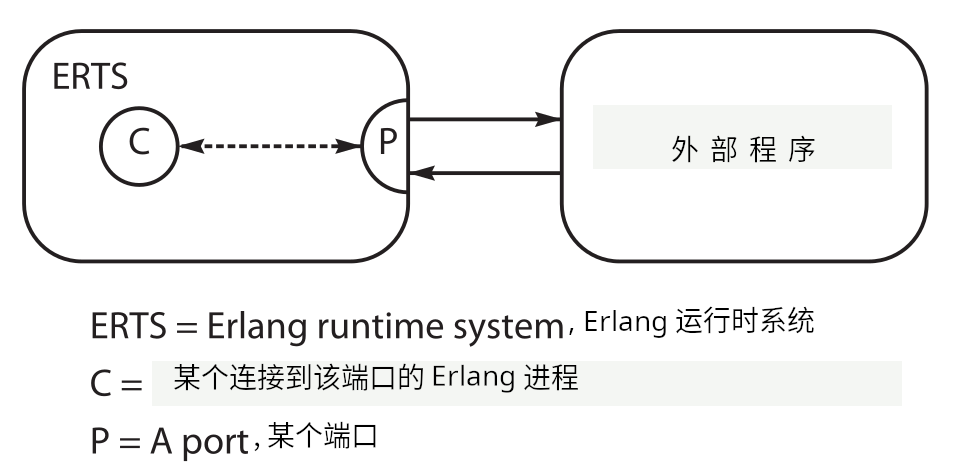
Erlang 通过名为 端口 的对象,与外部程序通信。当我们将一条消息发送给某个端口时,该消息将被发送到与该端口相连的外部程序。而来自外部程序的消息,将呈现为来自端口的 Erlang 消息。
就程序员而言,端口的行事方式,与 Erlang 进程无异。咱们可将消息发送给他,咱们可将其注册(就像进程一样),等等。当外部程序崩溃时,那么一个退出信号,将发送到所连接的进程,而当连接的进程死亡时,则对应外部程序也会被杀死。
请注意使用端口与外部进程通信,与使用套接字与外部程序通信的区别。当咱们使用端口时,端口将以 Erlang 进程方式行事,因此咱们可以链接到他,从远端的分布式 Erlang 节点发送消息给他等等。而当咱们使用套接字时,其将不会以进程方式行事。
创建了端口的进程,称为该端口的 连接进程。连接进程具有显著意义:所有发送到该端口的消息,都必须以连接进程的 PID 标记,同时所有来自外部程序的消息,都会发送到这个连接进程。
我们可以在下图中,看到连接进程(C)、端口(P)与外部操作系统进程间的关系:
要创建一个端口,我们就要调用 open_port,其是如下指定的:
-spec open_port(PortName, [Opt]) -> Port
其中 PortName 为如下选项之一:
-
{spawn, Command}会启动一个外部程序。
Command是某个外部程序的名字。除非找到一个名称为Command的链接驱动,否则Command会运行于 Erlang 工作区之外。 -
{fd, In, Out}允许 Erlang 进程访问当前由 Erlang 打开的任何文件描述符。其中文件描述符
In可用于标准输入,而文件描述符Out则可用于标准输出。
Opt 为以下选项之一:
-
{packet, N}数据包前面有
N(1、2 或 4)字节的长度计数。 -
stream发送以不带数据包长度发出。应用务必要知道,如何处理这些数据包。
-
{line, Max}按行投送信息。当行超过
Max字节数时,则其会被分拆为Max字节。 -
{cd, Dir}只对
{spawn, Command}这个选项有效。外部程序会在Dir下启动。 -
{env, Env}只对
{spawn, Command}这个选项有效。外部程序的环境,由列表Env中的环境变量扩展。Env是个{VarName, Value}对的列表,其中VarName和Value均为字符串。
这并非 open_port 的参数完整列表。咱们可以在 erlang 模组的手册页中,找到这些参数的详细信息。
以下消息可被发送给某个端口;请注意,在所有这些消息中,PidC 都是所连接进程的 PID。
-
Port ! {PidC, {command, Data}}向该端口发送
Data(一个 I/O 清单)。 -
Port ! {PidC, {connect, Pid1}}将连接进程的 PID,从
PidC改为Pid1。 -
Port ! {PidC, close}关闭该端口。
通过写下如下代码,连接进程就可以接收来自外部程序的消息:
receive
{Port, {data, Data}} ->
... Data comes from the external process ...
在后面的小节中,我们将把 Erlang 与一个简单 C 程序对接。这个 C 程序有意较短,以专注于我们如何完成对接的细节。
使用端口对接外部 C 程序
我们将以一些简单 C 代码开始。example1.c 包含着两个函数。第一个函数计算两个整数之和,第二个计算其参数的二倍。
int sum(int x, int y) {
return x+y;
}
int twice(int x) {
return 2 * x;
}
我们的最终目标,是在 Erlang 中调用这些例程。我们希望能以如下方式调用他们:
X1 = example1:sum(12,23),
Y1 = example1:twice(10),
从用户角度看,example1 就是个 Erlang 模组,因此到这个 C 程序的接口的所有细节,都应隐藏在 example1 这个模组内部。
要实现这点,我们需要将诸如 sum(12,23) 与 twice(10) 等函数调用,转换为我们通过端口的方法,发送给外部程序的字节序列。端口将一个长度计数,添加到这个字节序列,并将得到的结果发送给外部程序。当外部程序回复时,端口会收到该回复,并将结果发送给该端口的连接进程。
我们使用的协议非常简单。
-
所有数据包都以 2 字节的长度编码 (
Len) 开始,然后是Len个字节的数据。当我们以参数{packet,2}打开某个端口时,这个头部是由端口自动添加的; -
我们将调用
sum(N, M),编码为字节序列[1,N,M]; -
我们将调用
twice(N)编码为字节序列[2,N]; -
参数和返回值,均被假定为单个字节长。
外部的 C 程序和 Erlang 程序,都必须遵循这一协议。下图说明了在我们调用 example1:sum(12,23) 后,所发生的事情。他显示了端口是如何连接到外部 C 程序的。
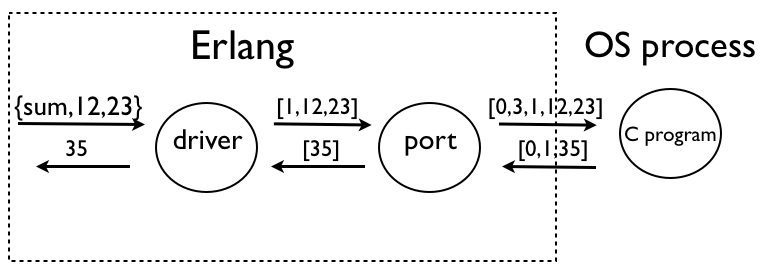
发生的事情如下:
-
驱动会将
sum(12,23)这个函数调用,编码为字节序列[1,12,23],并将{self(), {command, [1,12,23]}}这个消息,发送到端口; -
端口驱动会将一个 2 字节的长度头部,添加到该消息,而把字节序列
0,3,1,12,13发送给外部程序; -
外部程序会从标准输入,读取这五个字节,调用那个求和函数,然后将字节序列
0,1,35写入标准输出;其中前两个字节包含着数据包的长度。随后便是结果
35,其为 1 字节长。 -
端口驱动会移除那个长度的头部,并将一条
{Port, {data, [35]}}消息发送给连接进程; -
连接进程会解码出这条消息,并将结果返回给调用程序。
现在,我们必须编写出遵循这一协议,位于接口两侧的程序。
C 程序
C 程序有三个文件。
example1.c:包含着我们要调用的函数(早先我们已见到这个文件);example1_driver.c:管理字节流协议,以及调用example1.c中的例程;erl_comm.c:具有一些读写内存缓冲区的例程;
example1_driver.c
这段代码有个读取标准输入中命令、调用应用例程,并将结果写入标准输出的循环。请注意,当咱们打算调试这个程序时,咱们可写入 stderr;代码中有条注释掉的 fprintf 语句,展示了怎样做到这点。
#include <stdio.h>
#include <stdlib.h>
typedef unsigned char byte;
int read_cmd(byte *buff);
int write_cmd(byte *buff, int len);
int sum(int x, int y);
int twice(int x);
int main() {
int fn, arg1, arg2, result;
byte buff[100];
while (read_cmd(buff) > 0) {
fn = buff[0];
if (fn == 1) {
arg1 = buff[1];
arg2 = buff[2];
/* debug -- you can print to stderr to debug
fprintf(stderr, "calling sum %i %i\n", arg1, arg2); */
result = sum(arg1, arg2);
} else if (fn == 2) {
arg1 = buff[1];
result = twice(arg1);
} else {
/* just exit on unknown function */
exit(EXIT_FAILURE);
}
buff[0] = result;
write_cmd(buff, 1);
}
}
erl_comm.c
最后,下面是读写和写入标准输入和输出中数据的代码。这段代码被编写为允许可能的数据碎片。
/* erl_comm.c */
#include <unistd.h>
typedef unsigned char byte;
int read_cmd(byte *buf);
int write_cmd(byte *buf, int len);
int read_exact(byte *buf, int len);
int write_exact(byte *buf, int len);
int read_cmd(byte *buf)
{
int len;
if (read_exact(buf, 2) != 2)
return(-1);
len = (buf[0] << 8) | buf[1];
return read_exact(buf, len);
}
int write_cmd(byte *buf, int len)
{
byte li;
li = (len >> 8) & 0xff;
write_exact(&li, 1);
li = len & 0xff;
write_exact(&li, 1);
return write_exact(buf, len);
}
int read_exact(byte *buf, int len)
{
int i, got=0;
do {
if ((i = read(0, buf+got, len-got)) <= 0)
return(i);
got += i;
} while (got < len);
return (len);
}
int write_exact(byte *buf, int len)
{
int i, wrote = 0;
do {
if ((i = write(1, buf+wrote, len-wrote)) <= 0)
return (i);
wrote += i;
} while (wrote<len);
return (len);
}
这段代码专门用于处理有着 2 字节长头部的数据,因此他要与给到端口驱动程序的 {packet, 2} 选项匹配。
Erlang 程序
端口的 Erlang 侧,是由以下程序驱动的:
-module(example1).
-export([start/0, stop/0]).
-export([twice/1, sum/2]).
start() ->
register(example1,
spawn(fun() ->
process_flag(trap_exit, true),
Port = open_port({spawn, "./example1"}, [{packet, 2}]),
loop(Port)
end)).
stop() ->
?MODULE ! stop.
twice(X) -> call_port({twice, X}).
sum(X,Y) -> call_port({sum, X, Y}).
call_port(Msg) ->
?MODULE ! {call, self(), Msg},
receive
{?MODULE, Result} ->
Result
end.
loop(Port) ->
receive
{call, Caller, Msg} ->
Port ! {self(), {command, encode(Msg)}},
receive
{Port, {data, Data}} ->
Caller ! {?MODULE, decode(Data)}
end,
loop(Port);
stop ->
Port ! {self(), close},
receive
{Port, closed} ->
exit(normal)
end;
{'EXIT', Port, Reason} ->
exit({port_terminated, Reason})
end.
encode({sum, X, Y}) -> [1, X, Y];
encode({twice, X}) -> [2, X].
decode([Int]) -> Int.
这段代码遵循了一种相当标准的模式。在 start/0 中,我们创建了一个名为 example1 的注册进程(服务器)。call_port/1 实现了对服务器的远程过程调用。twice/1 和 sum/2 属于必须导出,且会发起对服务器远程过程调用的接口例程。在 loop/1 中,我们编码了到外部程序的请求,并处理来自这个外部程序的返回值。
这就完成了这些程序。现在我们只需一个 makefile 构建出这些程序。
编译并连接这个端口程序
这个 makefile 会编译及连接本章中讲到的这个端口驱动与链接驱动程序,以及所有有关 Erlang 代码。这个 makefile 只在 Mac OS X Mountain Lion 上测试过,其他操作系统将需要修改。他还包含了个小的测试程序,其会在每次重建代码时运行。
.SUFFIXES: .erl .beam .yrl
.erl.beam:
erlc -W $<
MODS = example1 example1_lid unit_test
all: ${MODS:%=%.beam} example1 example1_drv.so
@erl -noshell -s unit_test start
example1: example1.c erl_comm.c example1_driver.c
gcc -o example1 example1.c erl_comm.c example1_driver.c
example1_drv.so: example1_lid.c example1.c
gcc -I /usr/lib/erlang/usr/include/ \
-o example1_drv.so -shared -fPIC -Wl,-undefined,suppress \
example1.c example1_lid.c
clean:
rm example1 example_drv.so *.beam
译注:相比原文的
Makefile.mac,这里为适应在 Linux 系统上的编译,做了如下改动。
移除了
-arch、-bundle及-flat_namespace参数。这些参数是专用于 MacOS 的选项参数;将
-undefined suppress命令行开关,修改为-Wl,undefined,suppress,因为原来的写法已不受新版 GCC 支持;增加
-shared命令行开关,否则会报如下错误。gcc -I /usr/lib/erlang/usr/include/ \ -o example1_drv.so -fPIC -Wl,-undefined,suppress \ example1.c example1_lid.c /usr/bin/ld: /usr/lib/gcc/x86_64-pc-linux-gnu/15.2.1/../../../../lib/Scrt1.o: in function `_start': (.text+0x1b): undefined reference to `main' /usr/bin/ld: /tmp/ccs0nqFy.o: in function `example_drv_start': example1_lid.c:(.text+0x16): undefined reference to `driver_alloc' /usr/bin/ld: /tmp/ccs0nqFy.o: in function `example_drv_stop': example1_lid.c:(.text+0x43): undefined reference to `driver_free' /usr/bin/ld: /tmp/ccs0nqFy.o: in function `example_drv_output': example1_lid.c:(.text+0xe5): undefined reference to `driver_output' collect2: 错误:ld 返回 1 make: *** [Makefile:13:example1_drv.so] 错误 1
运行程序
现在我们可运行这个程序。
1> example1:start().
true
2> example1:sum(45, 32).
77
3> example1:twice(20).
40
这就完成了我们的第一个示例端口程序。这个程序实现的端口协议,是 Erlang 与外界通信的主要方式。
在进入下一主题前,请注意以下几点:
-
这个示例程序没有试图统一 Erlang 和 C 对整数为何的概念。我们只假定了 Erlang 和 C 中的整数是单个字节,而忽略了精度及符号的所有问题。在某个实际应用中,我们就必须仔细考虑相关参数的确切类型与精度。事实上,这可能相当困难,因为 Erlang 乐于管理任意大小的整数,而 C 等语言则对整数精度等,有固定概念;
-
在没有首先启动负责接口的驱动前,我们无法直接运行那些 Erlang 函数(也就是说,在咱们可运行该程序之前,某个程序必须要执行
example1:start())。我们会希望能在系统启动时,自动执行这个操作。这完全可行,但需要一些有关系统如何启动和停止的知识。我们将在 23.7 节 “应用” 中讨论这个问题。
在 Erlang 中调用 Shell 脚本
设想我们打算从 Erlang 中调用某个 shell 脚本。为此,我们可使用库函数 os:cmd(Str)。他会运行 Str 字符串中的命令,并捕获结果。下面是个使用 ip add show dev lo 命令的示例:
1> os:cmd("ip add show dev lo").
"1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000\n link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00\n inet 127.0.0.1/8 scope host lo\n valid_lft forever preferred_lft forever\n inet6 ::1/128 scope host noprefixroute \n valid_lft forever preferred_lft forever\n"
结果需要解析,提取出我们感兴趣的信息。
高级接口技术
除前面讨论到的技术外,还有一些其他可用于将 Erlang 与外部程序对接的技术。
接下来介绍的技术正不断改进,而且随着时间推移,其变化速度往往比 Erlang 本身更快。因为这一原因,他们在这里未被详细介绍。有关描述已移至在线归档,以便他们更快地得以更新。
-
链入的驱动
这些程序遵守与前面讨论的端口驱动同样协议。唯一不同的是,驱动代码是链接到 Erlang 内核,而因此是在 Erlang 的操作系统主进程中运行。要构造链入的驱动,必须要添加初始化驱动的少量代码,然后这个驱动必须要被编译,并链接到 Erlang 的虚拟机。
Port Drivers 有着链入式驱动的最新示例,以及如何对不同操作系统编译他们。
译注:原文提到的 erlang/linked_in_drivers 已在 GitHub 上找不到,应是合并到了新版本的 Erlang/OTP 发布中。
-
原生实现函数
NIF 即 原生实现函数。他们是一些以 C(或某些会编译到原生代码的语言) 编写的函数,并会被链接进到 Erlang 虚拟机中。原生实现函数会直接将参数传递到 Erlang 进程栈和堆上,并可直接访问全部 Erlang 内部数据结构。
有关 NIFs 的示例及最新信息,可在
erl_nif。译注: 原文所之的代码仓库 erlang/nifs 已找不到,应是已被合并到新的 Erlang/OTP 发布中。
-
C 节点
所谓 C 节点,是以 C 实现、遵守 Erlang 分布式协议的一些节点。“真正的” 分布式 Erlang 节点,可以某个 C 节点对话,并将认为这个 C 节点是个 Erlang 节点(前提是他不会试图在 C 节点上做任何花哨的事,比如发送 Erlang 代码给他执行)。
C 节点在 https://www.erlang.org/doc/system/tutorial.html 处的互操作性教程中有介绍。
那么,现在我们清楚了如何将 Erlang 与外部世界对接。在接下来的几章中,我们将了解如何从 Erlang 内部,访问文件和套接字。
练习
-
请下载前面给出的端口驱动代码,并在咱们的系统上测试;
-
请前往 Port Drivers。下载链入驱动的代码,并在咱们的系统上测试。其最棘手的部分,是找出编译和链接该代码的正确命令。当咱们在这个练习上失败时,请在 Erlang 邮件列表中寻求帮助;
-
请尝试咱们是否能找到一条发现咱们计算机有着什么样 CPU 的操作系统命令。当咱们能找到这样的命令,就编写个返回咱们 CPU 型号的函数,使用函数
os:cmd/1,调用这条操作系统命令。